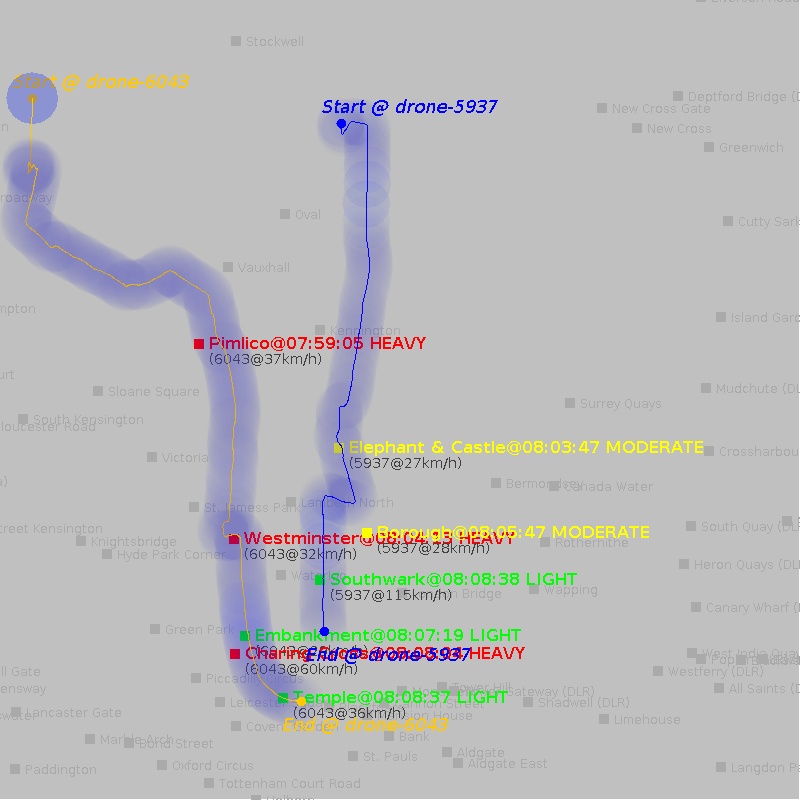
Elephant & Castle @ 08:03:47: MODERATE (drone: 5937,speed: 27km/h, distanceToStation: 343m) Borough @ 08:05:47: MODERATE (drone: 5937,speed: 28km/h, distanceToStation: 346m) Elephant & Castle @ 08:06:37: MODERATE (drone: 5937,speed: 32km/h, distanceToStation: 349m) Elephant & Castle @ 08:06:38: HEAVY (drone: 5937,speed: 30km/h, distanceToStation: 347m) Southwark @ 08:08:38: LIGHT (drone: 5937,speed: 115km/h, distanceToStation: 339m) Pimlico @ 07:59:05: HEAVY (drone: 6043,speed: 37km/h, distanceToStation: 344m) Westminster @ 08:04:13: HEAVY (drone: 6043,speed: 32km/h, distanceToStation: 347m) Embankment @ 08:07:19: LIGHT (drone: 6043,speed: 29km/h, distanceToStation: 343m) Charing Cross @ 08:08:04: HEAVY (drone: 6043,speed: 60km/h, distanceToStation: 348m) Temple @ 08:08:37: LIGHT (drone: 6043,speed: 36km/h, distanceToStation: 345m)